Homepage



HSMR2023 Workshop: Autonomous flexible surgical robots: where we are and where we are going
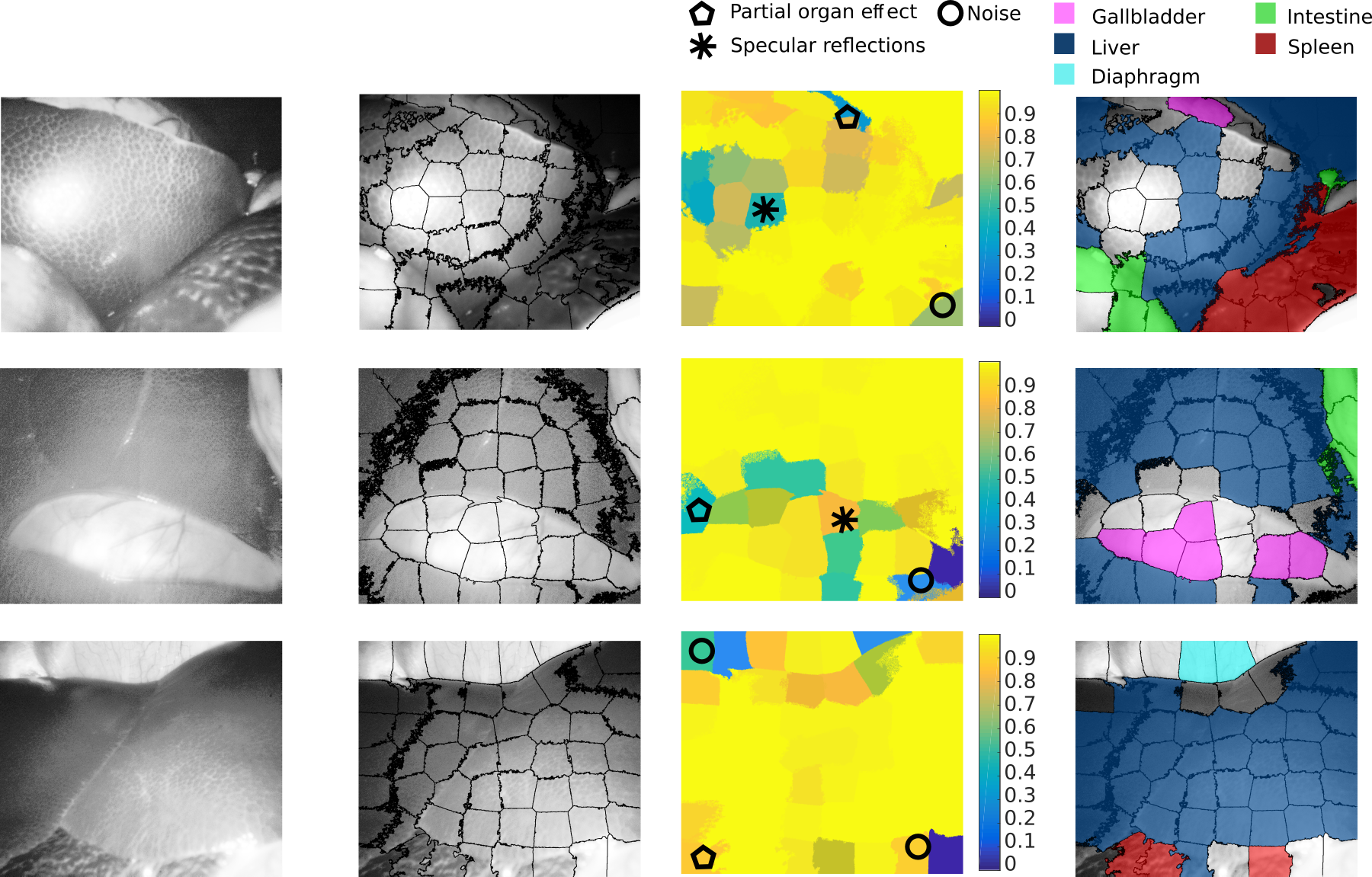
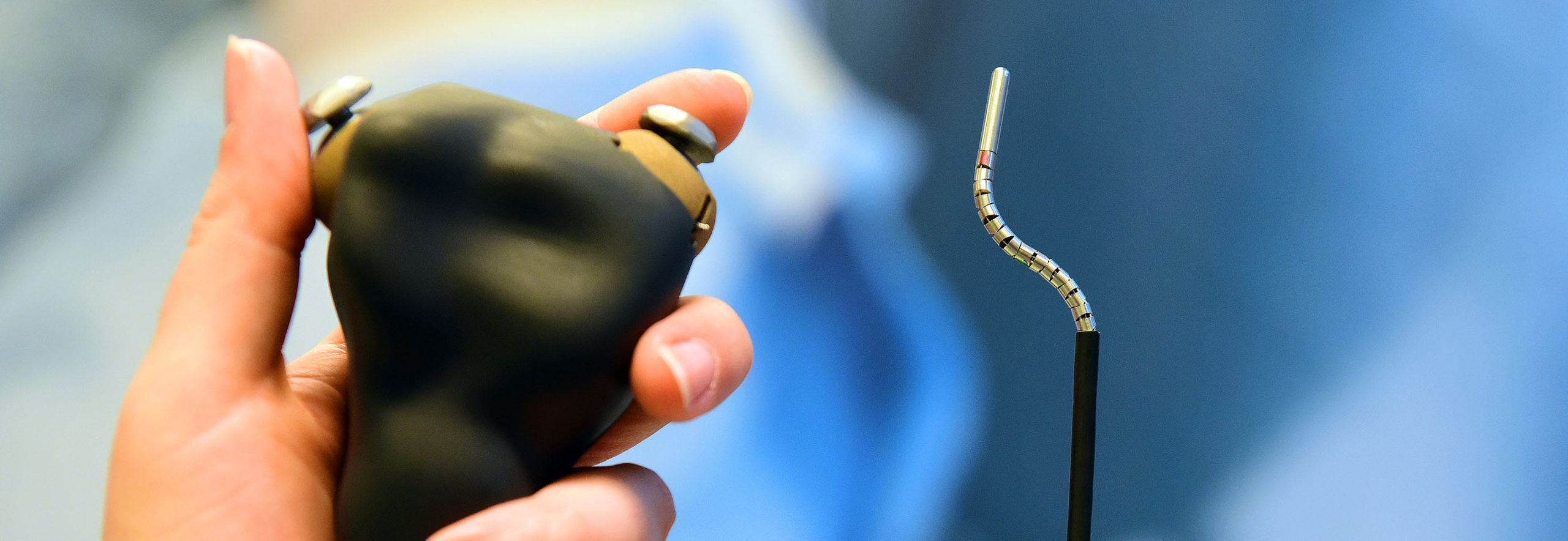
Introduction The development of flexible surgical instruments is taking Minimally Invasive Surgery (MIS) to hard or previously inaccessible anatomical areas using natural orifices or through small incisions. However, reliable and precise control of flexible tools remains a major challenge due to non-ergonomic design, non-intuitive steering and lack of shape sensing and visualisation technologies. Robotic approaches…
Capita Selecta #7 – AI and the future of surgical education
As part of the sixth Capita Selecta activity, on Thurday February 17th 2022 from 12:00 to 13:00, Dr. Domenico Veneziano will give a seminar talk to the ATLAS community titled ‘AI and the future of surgical education’. Join us online at: https://meet.google.com/czz-yssw-xys Bio: Urologist, an international key opinion leader in the field of surgical simulation and…
Journal club: Dupont et al, 2020.
A decade retrospective of medical robotics research from 2010 to 2020 Pierre E. Dupont, Bradley J. Nelson, Michael Goldfarb, Blake Hannaford, Arianna Menciassi, Marcia K. O’Malley, Nabil Simaan, Pietro Valdastri, Guang-Zhong Yang Science Robotics 2021; Vol 6, Issue 60 DOI: 10.1126/scirobotics.abi8017 In the last thirty years, publications on the medical robotics area have grown exponentially, from less than 10…
Capita Selecta #6 – Surgical Robotics trends and novel applications: SYMANI a Robot for Microsurgery
As part of the sixth Capita Selecta activity, on Friday November 26th 2021 from 5PM to 6PM, Dr. Massimiliano Simi gave a seminar to the ATLAS community titled ‘Surgical Robotics trends and novel applications: SYMANI a Robot for Microsurgery’. In his inspiring talk, Dr. Simi gave an overview about the robotic platforms commercially available for…
For more information
Department of Mechanical Engineering
Celestijnenlaan 300
B-3001 Heverlee (Leuven)
Belgium
[…] only pharmacies com[…]
only pharmacies com
cialis online paypal payment
cialis online paypal payment