Journal Club: Cianchetti et al, 2013
STIFF-FLOP Surgical Manipulator: mechanical design and experimental characterization of the single module
Matteo Cianchetti | Tommaso Ranzani | Giada Gerboni | Iris De Falco | Cecilia Laschi | Arianna Menciassi
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013 (Tokyo, Japan).
DOI: http://doi.org/10.1109/IROS.2013.6696866
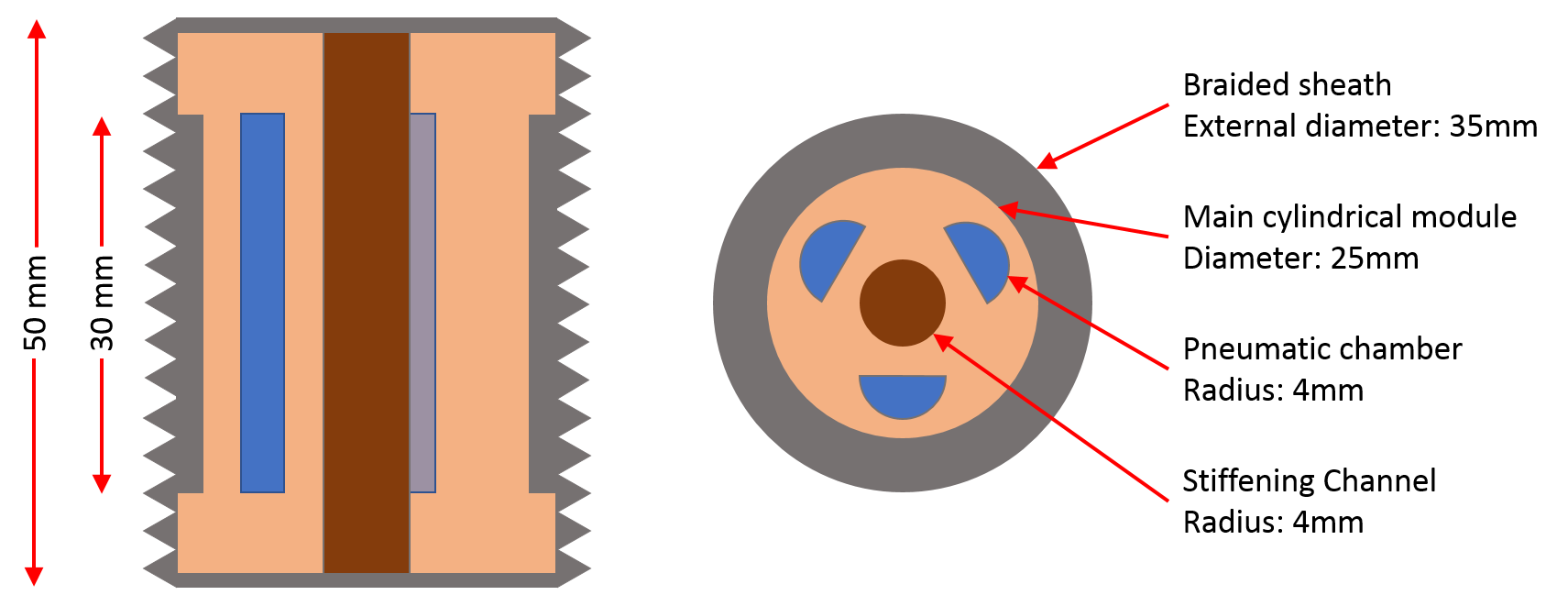
This paper combines the use of pneumatic actuators and granular jamming to demonstrate variable stiffness structural modules for minimal access surgery. The proposed surgical manipulator consists of a single or of multiple such module/s combined according to the need of the user (Figure 1 of the paper). Each module can bend omnidirectionally independently, elongate in the axial direction, and demonstrate ability to change stiffness. The main component of the manipulator module is a 50 mm long and 25 mm in diameter elastomeric cylinder (silicone Ecoflex™ 0050 – Smooth-on Inc.) containing internal chambers to hold either pneumatic fluids or granular material. There are 3 semi-circular half-cylindrical chambers of 30mm length, 4mm radius, radially placed symmetrically 120 degrees apart from each other (for fluidic actuators). There is another cylindrical chamber of 30 mm length and 8mm diameter placed at the center of the main elastomeric cylinder (for granular jamming). All these chambers are symmetrically placed with respect to the height of the module (Figure at the bottom of the post). When the fluidic chamber is inflated, it induces a bending in the module. However, the radial expansion of the chamber is more prominent than the bending (Figure 3 of the paper). To overcome this, a braided structure (like those used in the McKibben actuators) is coupled with the main cylindrical module. This lends radial constraints to the structure while keeping the flexibility required for bending through fluidic actuation. For granular jamming, coffee powder was used as granular material and latex as containing membrane. When a vacuum is applied, the density of granular material in the flexible membrane is increased which induces jamming. This keeps a high deformability in the unjammed state and undergoes a drastic stiffness increase in the jammed condition. By controlling the vacuum level, the stiffness can be tuned.
By inflating the fluidic chambers, bending and elongation performances of the STIFF-FLOP module is studied. Pressures used to induce bending and elongation range from 0 to 0.65 bar with a step of 0.05 bar. When a single chamber is inflated, it induces a 120-degree bending in the module at 0.65 bar. When two chambers are inflated, the bending induced is 80-degrees at 0.65 bar. When three chambers are inflated, there is elongation of the module instead of bending. The elongation observed was 86.3% at 0.65 bar. The authors also measured the maximum force that can be applied by the module when the fluidic chambers are inflated by attaching a loadcell to the top of the module. By just inflating a single chamber, a maximum force of 24.6N could be applied. By inflating two chambers, a maximum force of 41.4N could be applied. When all the three fluidic chambers were actuated, the maximum force applied goes up to 47.1N. The relationship between Force and inflation pressure is almost linear. The authors use coffee powder as the granular material for the sake of simplicity. When the central stiffening chamber is vacuumed, the authors report a maximum 36% increase in stiffness of the module. The authors stress that even though a complete shape locking cannot be generated, necessary stiffness to stabilise the robot during surgical tasks is possible.
The authors state that the flexible manipulator has been designed to meet specific requirements extracted from medical literature and from in vivo biomechanical tests of internal organs. The required functionalities of the surgical manipulator are reported as:
- Squeezing capabilities to pass through a traditional trocar port for single access surgery;
- Active capability to bend in any direction;
- Elongation;
- Ability to apply a sufficient force at relevant points along the arm;
- Selective and tunable stiffness of the modules/manipulator.
Discussion
The ESRs discussed the above-mentioned objectives and how the presented technologies could be implemented in the ATLAS project.